Comunicaciones en red
Los modelos de Raspberry Pi más utilizados (B, B+, 2B y 3B) incorporan interfaz Ethernet. El nuevo modelo 3B incorpora además una interfaz WiFi y la mayoría de los usuarios de otros modelos utilizan un pincho USB WiFi (dongle WiFi) para actualizar el sistema. Por tanto es obligado que hablemos un poco de comunicaciones, aunque lo haremos desde una perspectiva puramente práctica, sin entrar en detalles excesivamente técnicos. Por supuesto te recomendamos que amplíes la información con la amplia bibliografía existente, por ejemplo [Citation not found].
Abre un terminal de órdenes y teclea lo siguiente:
pi@raspberrypi:~ $ ip addr
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: eth0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc pfifo_fast state DOWN group default qlen 1000
link/ether b8:27:eb:0c:0c:03 brd ff:ff:ff:ff:ff:ff
inet6 fe80::84bc:c6c6:4e28:fc2a/64 scope link tentative
valid_lft forever preferred_lft forever
3: wlan0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc mq state UP group default qlen 1000
link/ether 00:13:ef:71:03:d0 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.38/24 brd 192.168.1.255 scope global wlan0
valid_lft forever preferred_lft forever
inet6 fe80::146d:4f11:30bf:17a4/64 scope link
valid_lft forever preferred_lft forever
pi@raspberrypi:~ $ ▂
Precedidos por un número aparecen todas las interfaces de red con las
que cuenta en este momento tu Raspberry Pi. En mi caso lo, eth0 y
wlan0.
loes la interfaz de loopback, una interfaz virtual que conecta el ordenador consigo mismo. Es muy útil para trabajar con programas de red sin necesidad de usar una red física.eth0es la interfaz Ethernet cableada (IEEE 802.3). Tanto el modelo B original como los modelos B+, 2B y 3B disponen de una interfaz Ethernet integrada. Los demás modelos pueden incorporarla fácilmente usando un dongle USB-Ethernet. Permite hasta Fast Ethernet (velocidades de transferencia de hasta 100 Mbits/s). No es fácil que se actualice a GbE o 10GbE porque internamente la interfaz Ethernet utiliza un puerto USB y de momento los SoC de Broadcom no incorporan nada más que USB 2.0.wlan0es la interfaz WiFi (Wireless Local Area Network). Solo el modelo 3B incorpora interfaz WiFi pero es mu sencillo y muy frecuente añadir una interfaz WiFi USB.
Las redes de comunicaciones hoy en día utilizan en su gran mayoría la familia de protocolos TCP/IP. Se trata de los protocolos que se diseñaron para construir Internet, la red de redes. Hay dos versiones actualmente en uso IPv4 (Internet Protocol v4) e IPv6. Aunque son bastante similares hay importantes diferencias que en su mayoría escapan del interés y alcance de este taller. Veremos lo suficiente de IPv4 como para manejarnos en nuestras necesidades de comunicación entre dispositivos y dejaremos IPv6 para futuras ediciones, cuando su grado de adopción sea mayor.
La familia de protocolos TCP/IP está principalmente construida sobre el protocolo IP, que proporciona unas capacidades y garantías básicas. Entre ellas cabe destacar el direccionamiento y el encaminamiento.
Direcciones IPv4
Cada interfaz de red puede tener varias direcciones IP y podemos gestionarlas si así lo deseamos de forma manual. Las direcciones IP funcionan básicamente como códigos postales. Están organizadas de forma jerárquica, lo que facilita la entrega. Por ejemplo, si enviamos una carta al código postal 45005 el cartero sabe que es de Toledo porque empieza por 45. Por tanto llegará en primer término a la central de correos de Toledo, que a su vez la repartirá a sus distintas delegaciones provinciales. En Internet cada central de correos se denomina router y las direcciones IP, a diferencia de los códigos postales, identifican plenamente al ordenador destinatario.
Pero ¿cómo llegan los mensajes a un ordenador? Claramente se necesita una interfaz de red. Por tanto las direcciones están asociadas a esa interfaz de red. Puede entenderse como una puerta de una casa. El cartero deja la carta en una puerta, pero nada impide que una casa tenga más de una puerta. Cada puerta tiene asociada una dirección (número) diferente.
Vamos a examinar un poquito la red de mi propia Raspberry Pi y luego
veremos cómo configurar la tuya. Nos interesa la ultima parte de la
salida de la orden ip addr, que también se puede conseguir así:
pi@raspberrypi:~ $ ip addr list wlan0
3: wlan0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc mq state UP group default qlen 1000
link/ether 00:13:ef:71:03:d0 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.38/24 brd 192.168.1.255 scope global wlan0
valid_lft forever preferred_lft forever
inet6 fe80::146d:4f11:30bf:17a4/64 scope link
valid_lft forever preferred_lft forever
pi@raspberrypi:~ $ ▂
Aparecen tres listas de direcciones: link/ether corresponden a lo
que se conoce como direcciones de nivel de enlace. Es un término
técnico muy importante, pero que no veremos en el taller. La etiqueta
inet corresponde a los datos de IPv4, que son los que usaremos en el
taller. La etiqueta inet6 corresponden a los datos de IPv6 que
dejaremos para futuras ampliaciones. Vamos a detenernos en los datos
de IPv4.
| Campo | Valor | Descripción |
|---|---|---|
| Protocolo | inet |
Direcciones IPv4. |
| Dirección | 192.168.1.38/24 |
Dirección de 4 octetos donde los 24 primeros bits son indicativos de la subred a la que pertenece. |
| Difusión | 192.168.1.255 |
Dirección de difusión a toda la subred. |
| Ámbito | global |
Ámbito de validez de la dirección. |
| Interfaz | wlan0 |
Primera interfaz WiFi. |
La dirección IP (e.g. 192.168.1.38) es una secuencia de 4 octetos (números de 0 a 255) habitualmente separados por puntos.
El sufijo /24 sirve para indicar qué parte de la dirección (en bits
contados desde el más significativo) es común para toda la subred y
qué parte es específica de cada ordenador de la subred. Con la
metáfora del correo equivaldría a determinar qué parte de la dirección
es el nombre de la calle y qué parte es el número de casa. En nuestro
caso 192.168.1 es común para toda la red y solo el último número es
indicativo del ordenador.
El ámbito o scope de la dirección indica en qué contextos tiene
sentido esa dirección. Las direcciones interesantes tienen alcance
global, permiten comunicar al ordenador con cualquiera de los
conectados a toda Internet. Otras direcciones tendrán ámbito host,
como ocurre con la interfaz lo. Esas direcciones no están pensadas
para comunicar procesos más allá de tu ordenador y sería un error
pretender usarla para comunicar dos ordenadores diferentes.
La dirección de broadcast o difusión es una dirección especial que
se utiliza para enviar mensajes a toda la subred a la que está
conectada la interfaz. Se puede construir tomando la parte común de
las direcciones de la red (192.168.1) y añadiendo unos en todos los
bits restantes hasta los 32 que componen una dirección IPv4. En este
caso solo quedan ocho bits por completar, que al ponerlos a uno
dejarían un 255 en el último octeto.
Vamos a hacer primero pruebas dentro de nuestro propio ordenador y para ello vamos a usar la interfaz de loopback.
| Campo | Valor | Descripción |
|---|---|---|
| Protocolo | inet |
Direcciones IPv4. |
| Dirección | 127.0.0.1/8 |
Dirección de 4 octetos donde los 8 primeros bits son indicativos de la subred a la que pertenece. |
| Ámbito | host |
Ámbito de validez de la dirección. |
| Interfaz | lo |
Interfaz de loopback. |
Podemos añadir direcciones a la interfaz de loopback con:
pi@raspberrypi:~ $ sudo ip addr add 192.168.1.39 dev lo
pi@raspberrypi:~ $ ip addr list lo
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet 192.168.1.39/32 scope global lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
pi@raspberrypi:~ $ ▂
Fíjate que necesitamos utilizar sudo para poder añadir direcciones
IP, puesto que es una operación de administración.
Así podemos añadir direcciones de forma manual, aunque lo habitual será que éstas se añadan de forma automática. Para ello se emplea un protocolo denominado DHCP (Dynamic Host Configuration Protocol). Si conectas un cable Ethernet desde tu router, o desde tu conmutador Ethernet, o uno de los cables de red del laboratorio a la interfaz Ethernet de la Raspberry Pi verás cómo se añade de forma automática una dirección. Lo mismo ocurre con los puntos de acceso WiFi. Por ejemplo pincha en el símbolo WiFi en la parte superior derecha de la pantalla. Verás todas las redes disponibles.
Selecciona la que corresponde a eduroam o a tu punto de acceso WiFi
y aparecerá un cuadro de diálogo para que introduzcas los datos de
autenticación. Estos datos dependen del tipo de red WiFi, pero es muy
similar a la configuración de tu portátil o teléfono móvil, así que
seguro que no te resulta complicado.
Cuando estés conectado a la red WiFi verás que aparece una nueva
dirección IPv4 y posiblemente otra IPv6 en la interfaz wlan0.
Servicio de nombres
¿Y no te extraña que después de todos estos años usando Internet no hayas tenido que usar direcciones IP nunca? Bueno, tal vez en la configuración del punto de acceso WiFi, o para compartir archivos entre móviles, pero poco mas. ¿Me equivoco?
El motivo es que este mecanismo de direcciones se simplifica con otro
protocolo adicional, el servicio de nombres (DNS, Domain Name
System). Es un servicio similar a las páginas amarillas de los
teléfonos. No tenemos que saber o recordar todos los teléfonos,
simplemente tenemos que buscar el nombre en la guía telefónica. El
DNS funciona de forma similar. Asocia las direcciones IP a nombres
fácilmente recordables, como www.uclm.es o google.com. Cuando sea
necesario utilizaremos el servicio de nombres para obtener la
dirección IP correspondiente. Por ejemplo, vamos a averiguar la
dirección IP de www.uclm.es:
pi@raspberrypi:~ $ host www.uclm.es
www.uclm.es has address 161.67.137.169
pi@raspberrypi:~ $ ▂
Warning Todos los ejemplos de consulta a DNS o conexiones a servidores externos necesitan conexión a Internet. Puedes usar el cable Ethernet de tu puesto de laboratorio.
Puede haber más de una dirección asociada a un nombre. Por ejemplo:
pi@raspberrypi:~ $ host twitter.com
twitter.com has address 104.244.42.1
twitter.com has address 104.244.42.65
twitter.com mail is handled by 20 alt1.aspmx.l.google.com.
twitter.com mail is handled by 30 ASPMX3.GOOGLEMAIL.com.
twitter.com mail is handled by 20 alt2.aspmx.l.google.com.
twitter.com mail is handled by 10 aspmx.l.google.com.
twitter.com mail is handled by 30 ASPMX2.GOOGLEMAIL.com.
pi@raspberrypi:~ $ ▂
Bueno, aquí vemos que el DNS no solo tiene direcciones IP, pero eso es otra historia y se sale de los objetivos del taller. Lo importante es que observes que hay dos direcciones asociadas a twitter.com y cualquiera de ellas se puede usar
Protocolos de transporte
Una red de comunicaciones está para comunicar, así que vamos a ello. En este capítulo solo utilizaremos herramientas de tu Raspberry Pi, sin teclear ni una sola línea de programas. Empezaremos con netcat, una maravillosa herramienta para probar programas de red. Abre dos terminales diferentes y ejecuta en el primero lo siguiente:
pi@raspberrypi:~ $ nc -l 8888
El programa se queda esperando (la opción l significa listen,
escucha) sin hacer nada. Es lo que se conoce como un servidor. Vete
al otro terminal y ejecuta lo siguiente.
pi@raspberrypi:~ $ nc 127.0.0.1 8888
Prueba de mensaje
Esta vez ejecutamos netcat como un cliente conectado a la dirección 127.0.0.1. Esa es la dirección de la interfaz de loopback, asi que conectamos con nuestro propio ordenador. Mira en el primer terminal. ¡Magia! Teclea ahora en el primer terminal:
pi@raspberrypi:~ $ nc -l 8888
Prueba de mensaje
Otra prueba de mensaje
¿Se ve? Tienes un canal bidireccional de datos, puedes enviar y recibir indistintamente. Para salir pulsa la tecla Ctrl y sin soltarla pulsa la letra C.
El número 8888 es lo que se conoce como un número de puerto. Si seguimos con la metáfora de correos equivaldría al buzón dentro de una casa de pisos. Se reserva un puerto para cada servicio. Los puertos por debajo de 1024 son privilegiados en el sentido de que se utilizan para servicios del sistema y por tanto un usuario normal no puede atender peticiones en esos puertos. Veamos un ejemplo, el puerto 80 es el puerto del servidor web. Ejecuta esto:
pi@raspberrypi:~ $ sudo ip addr add 161.67.137.169 dev lo
pi@raspberrypi:~ $ sudo nc -l 80 << EOF
HTTP/1.0 200 OK
<html><body><h1>You fool!</h1></body></html>
EOF
Ahora ejecuta el navegador web e intenta ver la página www.uclm.es. ¿Sorprendido?
Hemos añadido una dirección IP a la interfaz de loopback que
coincide con la de www.uclm.es. Cuando introducimos este sitio en
el navegador éste utiliza el DNS para obtener la dirección IP
correspondiente y envía un mensaje de petición a esa dirección IP.
Como se trata de una dirección IP conocida el mensaje ni siquiera sale
del ordenador, se lo queda la interfaz de loopback. En todas las
direcciones del ordenador tenemos a netcat escuchando en el puerto
80, así que ese mensaje de petición le llega a netcat. Lo que hay
entre << EOF y EOF no es más que una forma de indicar que eso es
lo que debe escribir por entrada estándar. Y lo que se escribe por
entrada estándar netcat se encarga de mandarlo al otro extremo de la
comunicación. ¡Voilà! Un servidor web de pobres.
Este ejemplo te habrá dejado claro por qué las direcciones IP solo las puede poner el administrador del sistema. En caso contrario sería trivial hacer ataques de man-in-the-middle contra los usuarios de ese ordenador. Yo creo que ya puedes borrar esa dirección de la interfaz de loopback.
pi@raspberrypi:~ $ sudo ip addr del 161.67.137.169 dev lo
pi@raspberrypi:~ $ ▂
Ya sabes comunicar datos, pero no solo entre dos terminales del mismo ordenador. Si estás conectado a la red prueba a conectar los dos netcat ejecutando cada uno en distinto ordenador. ¡Ya sabes comunicar datos con TCP/IP!
Transmission Control Protocol
Internet es mucho más hostil de lo que puedes apreciar con una prueba en tu propia Raspberry Pi. Las comunicaciones entre ordenadores que distan más de diez mil kilómetros involucran a decenas de dispositivos intermedios. Hay una probabilidad nada despreciable de que algo no vaya bien. Pérdidas de mensajes, o incluso reorganizaciones de la red son normales durante el mismo proceso de comunicación. ¿Qué debes hacer entonces? La respuesta es a la vez simple y reconfortante: nada. Lo que se puede hacer ya lo hace el protocolo subyacente, TCP (Transmission Control Protocol). Cuando usabas netcat estabas usando TCP sin saberlo. Se trata de un protocolo de transporte construido sobre IP. Este protocolo proporciona mecanismos de control de flujo, fragmentación, reensamblado, integridad de datos, reordenación y retransmisión para que la experiencia de comunicación sea lo más parecida posible a la ideal, incluso aunque las cosas no vayan bien. Es tan importante que a toda la familia de protocolos de Internet se le llama TCP/IP, aunque TCP e IP son solo dos protocolos de la familia.
No cabe duda de que ha tenido éxito. La gran mayoría de los servicios a gran escala de Internet se construyen sobre TCP: la web, el correo electrónico, los sistemas de mensajería instantánea, el servicio de directorio, y prácticamente todo lo que requiera cifrado de extremo a extremo.
Sin embargo para proporcionar garantías de entrega TCP tiene que utilizar una serie de mecanismos que consumen tiempo, y es un tiempo que no es fácilmente controlable. Se dice que TCP introduce latencia no acotada. Es decir, no es posible cuantificar exactamente el tiempo máximo que tardará en llegar un mensaje a su destino, ni siquiera poner un límite superior.
Piensa en sistemas que requieran una respuesta en un tiempo acotado. Es lo que se conoce como sistemas de tiempo real. Hay de todo tipo, desde sistemas de control de maquinaria, hasta sistemas multimedia.
Sistemas de tiempo real crítico (Hard Real-Time Systems). Un sistema de control de un robot, un avión o un helicóptero no se puede plantear la retransmisión indefinida de los mensajes. Si hay un problema debe tratarse a tiempo para garantizar en todo momento la seguridad de los usuarios y la propia integridad física del aparato. En ocasiones los tiempos de respuesta no pueden superar un puñado de microsegundos y si no responde a tiempo el resultado puede ser fatal. Este tipo de sistemas no se puede tratar con GNU/Linux tal y como lo hemos visto hasta ahora. No descartamos un futuro taller para este tipo de sistemas, pero desde luego se sale de los objetivos del curso actual.
Sistemas de tiempo real blando (Soft Real-Time Systems). En otros casos la respuesta en un tiempo acotado es deseable, pero no tiene consecuencias catastróficas si no se cumple. Es el caso de los sistemas multimedia. Cuando se realizan comunicaciones de voz y vídeo es deseable que la tasa de llegadas sea más o menos constante y sobre todo que no se acumulen retrasos de más de la duración del buffer. Si no se cumple veremos cortes en el video y molestos clicks metálicos en el audio. Este tipo de sistemas se pueden tratar sin problemas con GNU/Linux pero TCP no suele ser la mejor opción posible.
Unreliable Datagram Protocol
Todos los sistemas de tiempo real tienen un requisito común: necesitan reducir la latencia al mínimo posible. La latencia es el tiempo que pasa desde que se envía un mensaje hasta que se entrega en el otro extremo.
Para tratar estos problemas existe un protocolo complementario de TCP, el Unreliable Datagram Protocol (UDP). En UDP no hay control de flujo, no hay retransmisiones, no hay reordenación, no hay nada más que encaminamiento y garantía de integridad. Osea, sabemos cómo llevar los mensajes a su destino y si llegan seguro que son los que se enviaron. Eso es todo. Pueden llegar en orden distinto al de envío, pueden perderse por el camino, pueden incluso duplicarse. Y el emisario nunca tendrá ningún tipo de realimentación sobre si el mensaje ha sido recibido correctamente o no. Poco, ¿verdad?
La parte positiva es que la latencia, especialmente en redes con pérdidas o congestionadas, es sensiblemente inferior. Así que se usa para difusión de video y audio. Por su simplicidad también se suele usar para comunicar con dispositivos muy pequeños (microcontroladores de 8 bits, FPGAs, etc.). Todas las garantías necesarias quedan como responsabilidad de la aplicación. Por ejemplo, si necesita confirmaciones debe enviar mensajes UDP solicitando esas confirmaciones.
Bueno, suficiente teoría, manos a la obra. Prepara los dos terminales como en el caso de la comunicación TCP anterior y ejecuta lo siquiente en el primero.
pi@raspberrypi:~ $ nc -u -l 8888
Este es el servidor UDP. Servidor es el nombre del rol pasivo en la comunicación, el que espera. Eso no significa que no hable, pero no habla hasta que alguien (un cliente) inicia una conversación.
En el otro terminal ejecuta el cliente:
pi@raspberrypi:~ $ nc -u 127.0.0.1 8888
Prueba a transitir datos en los dos sentidos. Como ves funciona de forma muy similar y no podrás apreciar la diferencia si no usas equipos relativamente distantes y redes algo congestionadas. Para los efectos del taller son prácticamente equivalentes, y nos decantaremos por uno u otro según los requisitos de la aplicación.
Wireshark
Cuando se utilizan comunicaciones en red es muy frecuente que aparezcan problemas de todo tipo. ¿Cómo los diagnosticamos? La forma más sencilla es utilizar una herramienta de captura y análisis de tráfico. En tu Raspberry Pi ya tienes instalada una de las mejores herramientas disponibles: Wireshark.
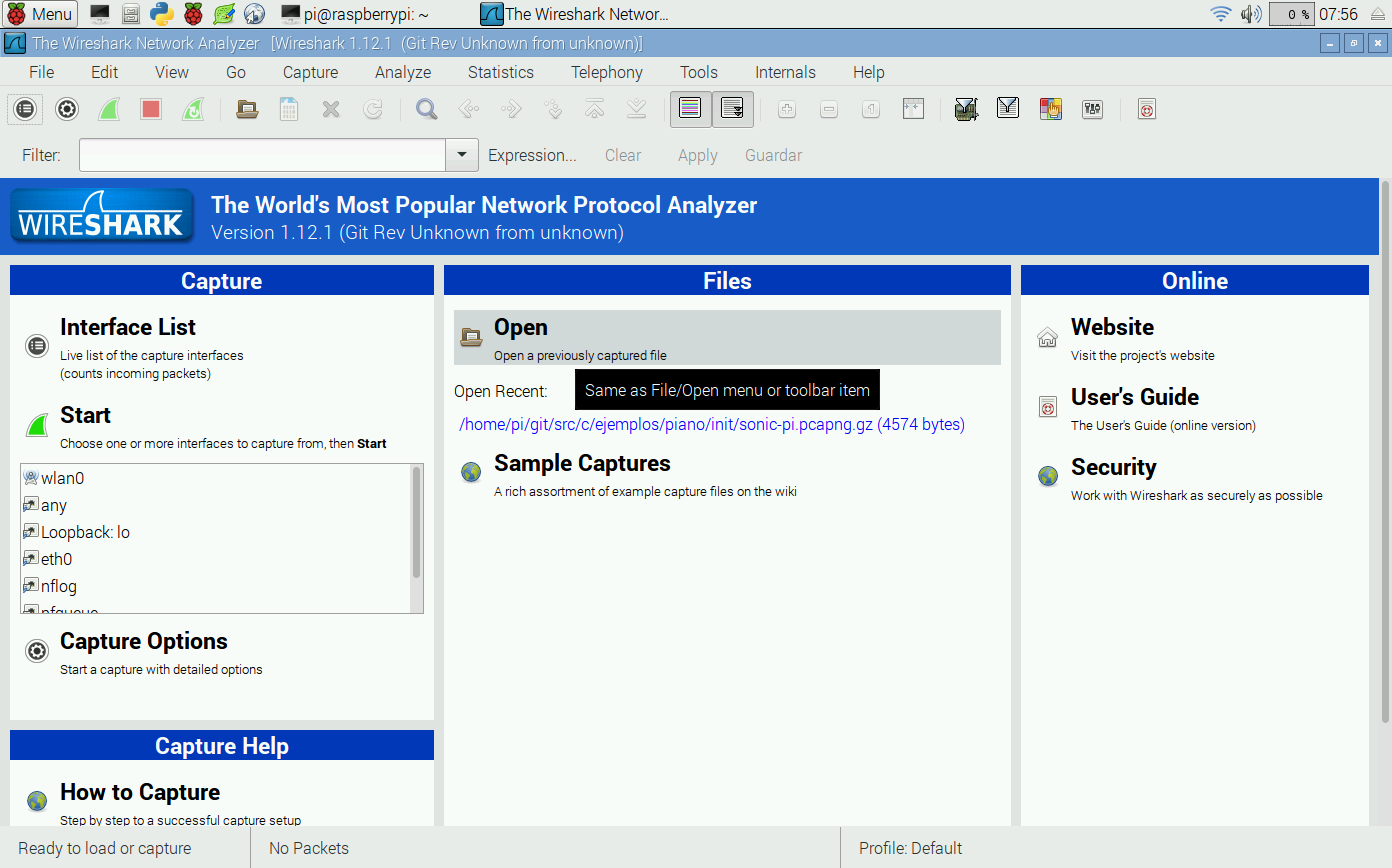
Al arrancar la aplicación muestra algo parecido a la figura. Aparece una lista con las interfaces de red que ya conocemos y alguna más que se escapa de lo que se pretende con este taller. Selecciona la interfaz loopback: lo y pulsa en Start.
Ahora vuelve a repetir el ejemplo de comunicación TCP y UDP que hemos hecho en este capítulo. Es interesante incluso equivocarse a propósito. Prueba por ejemplo a ejecutar el cliente UDP sin que haya servidor al otro extremo. El resultado será algo así:
Lo normal en una red es ver centenares de paquetes y es relativamente difícil encontrar lo que nosotros queremos examinar. Por eso Wireshark incorpora características de filtrado muy avanzadas. Para la captura pulsando sobre el botón del cuadrado rojo y vamos a filtrar los paquetes que nos interesan. Por ejemplo, vamos a ver los paquetes TCP destinados al puerto que hayas usado. Para ello pulsa en Expression... Tendrás un diálogo como el de la figura en el que puedes escribir TCP para encontrar todos los campos de TCP.
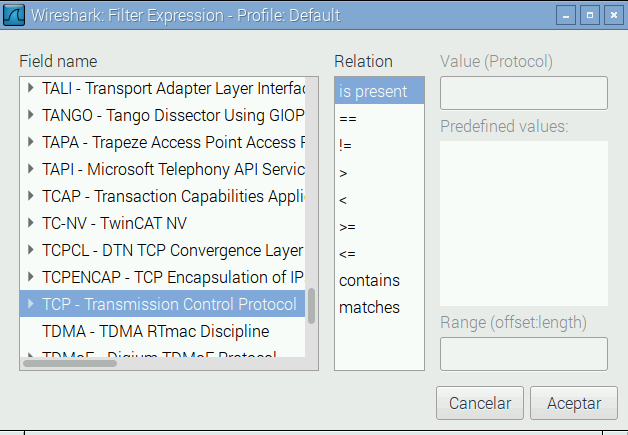
Despliega todos los parámetros del protocolo TCP y selecciona
tcp.port. En la columna Relation elige == y en la columna
Value elige el número de puerto que hayas usado. Para terminar
pulsa Aceptar. Ahora verás en la casilla Filter la expresión que
has seleccionado, algo del estilo a tcp.port == 3040. Pero todavía
no la hemos aplicado. Pulsa al botón Apply. Ya solo aparece la
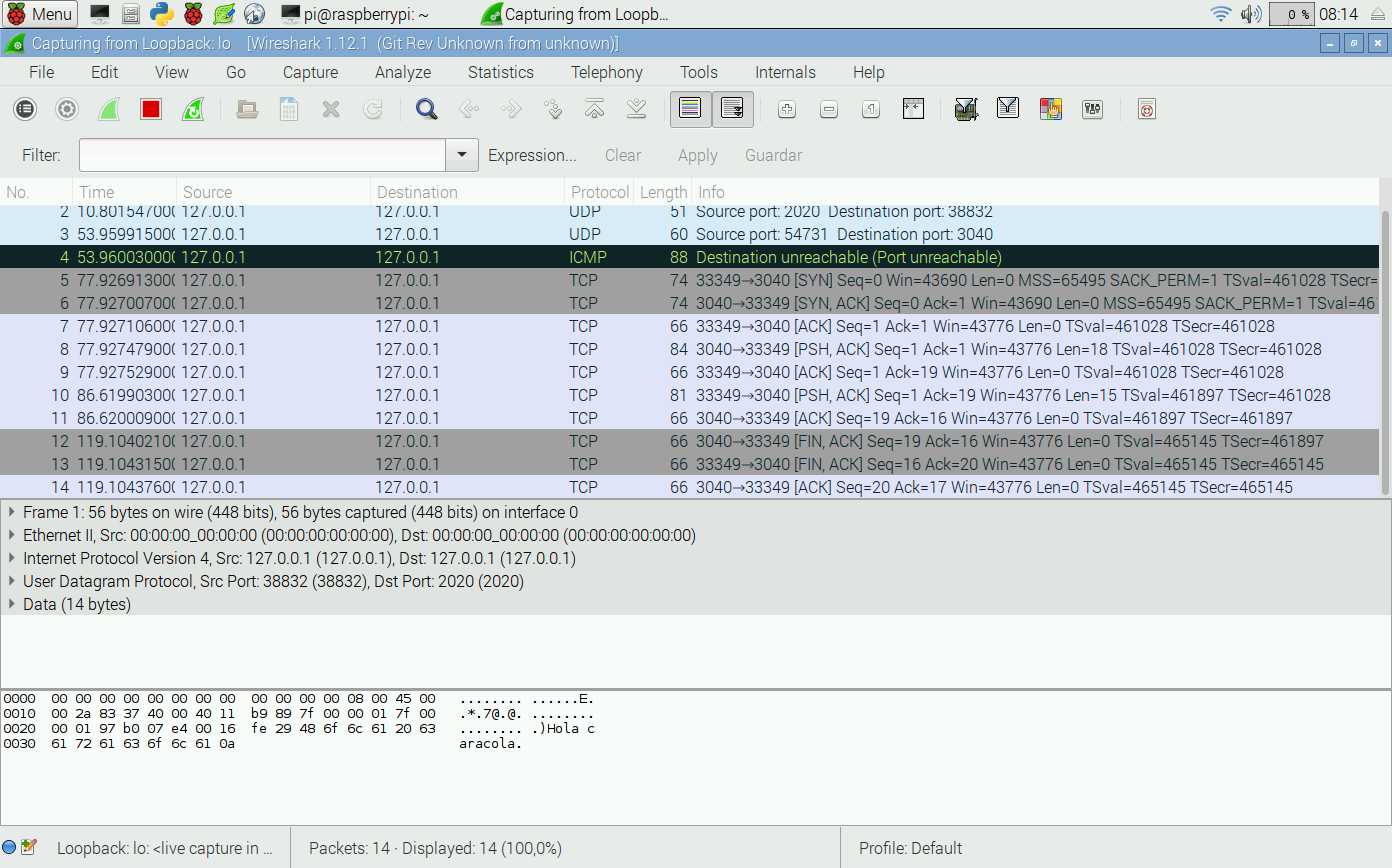
conversación que nos interesa. Como ves las cosas son más complicadas
de lo que parecen:
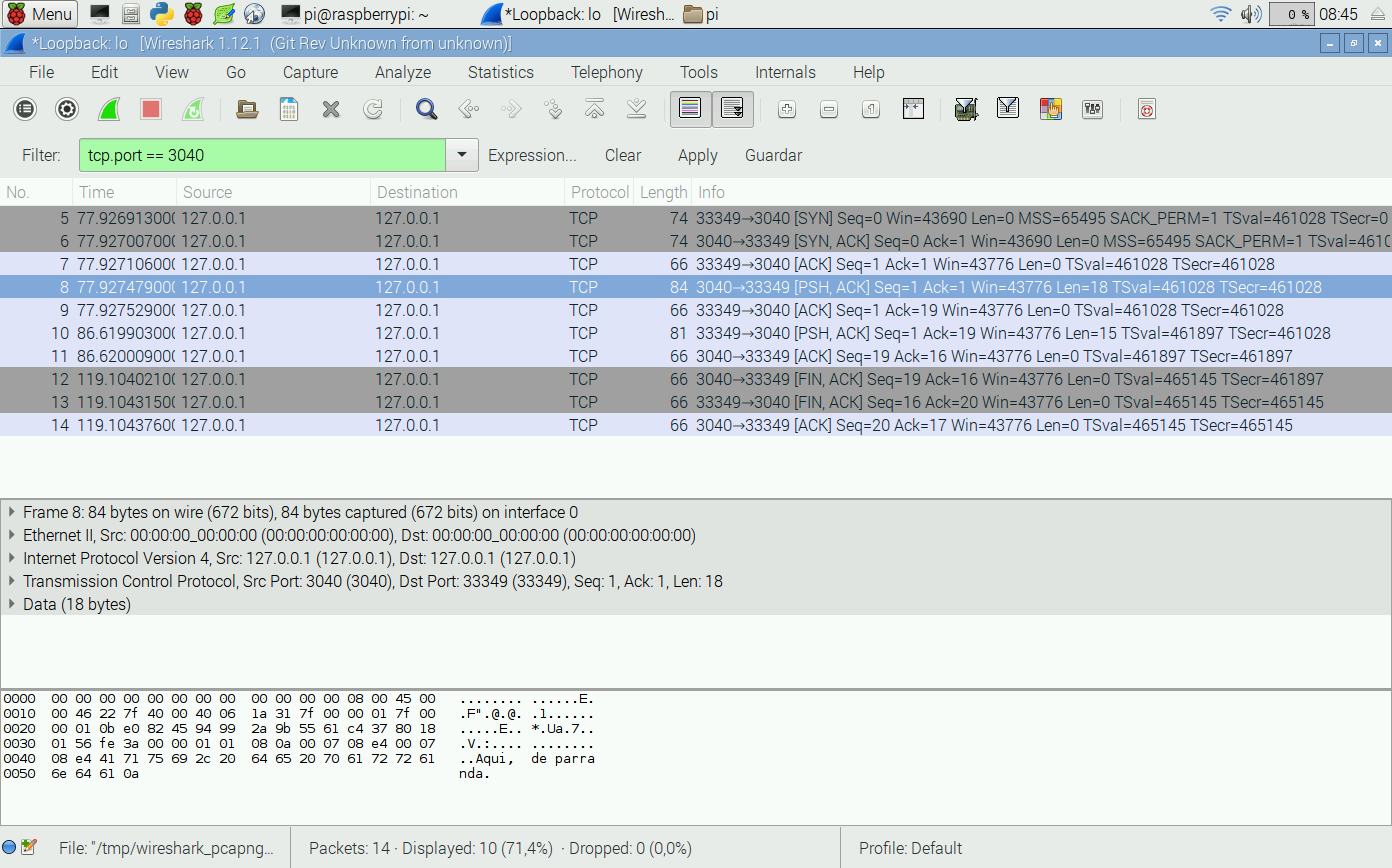
Los tres primeros mensajes son el establecimiento de conexión (triple handshake) y hasta el cuarto mensaje no vemos lo que nosotros hemos enviado. En la ventana centras aparecen diseccionados los distintos elementos de cada mensaje capturado.
Otra opción muy útil es el seguimiento del flujo completo. Pulsa el botón derecho sobre cualquiera de los mensajes en la parte superior de la pantalla y selecciona la opción Follow TCP Stream en el menú contextual que te aparece.
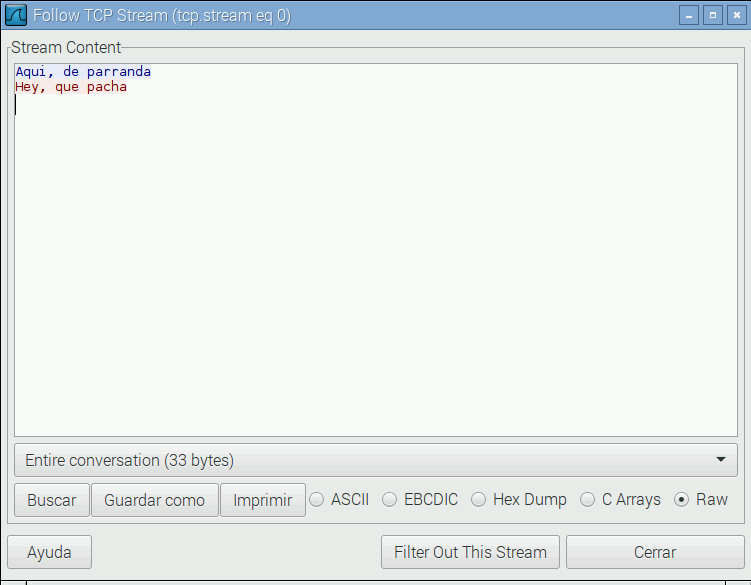
Aparece toda la secuencia de intercambio de datos sin toda la parafernalia de TCP. Solo los datos. En azul en un sentido y en rojo en el otro. Además podemos seleccionar solo el tráfico en uno de los sentidos. Esto es extraordinariamente útil cuando queremos replicar el comportamiento de otros programas.
Programando en red
La historia de las redes de comunicaciones entre ordenadores está muy relacionada con la historia de Unix y por tanto indirectamente con GNU/Linux. En la Universidad de California en Berkeley se generalizó la idea original de Unix, en la que todo es un archivo, a las redes. Las comunicaciones se programan de forma muy similar al uso de archivos. Estos archivos especiales se denominan sockets.
La interfaz de programación basada en sockets (API socket) sigue siendo la dominante hoy en día para tratar con redes de comunicaciones y es la que que veremos en el capítulo correspondiente.
De todas formas conviene dar unas pequeñas nociones de los fundamentos generales antes de escribir código. En la introducción a GNU, en el capítulo 1 de este manual, ya hablamos de los descriptores de archivo. Son números que representan a los archivos desde el punto de vista del sistema operativo. Básicamente proporcionan una interfaz basada en cuatro operaciones básicas, que corresponden a llamadas al sistema (servicios del sistema operativo):
- La llamada open abre un archivo. Busca el archivo en el sistema de archivos usando un nombre jerárquico que se denomina ruta del archivo y asigna un nuevo descriptor de archivo. A partir de este momento nos podemos olvidar de la ruta. El sistema operativo solo necesita el descriptor.
- La llamada close cierra el archivo. Con esto el sistema operativo termina todas las operaciones en curso que afectan al archivo y libera su descriptor para que pueda ser reutilizado con otro archivo.
- La llamada write escribe en el archivo un conjunto de octetos y la llamada read lee del archivo un conjunto de octetos.
Esta interfaz de programación se utiliza en GNU para multitud de operaciones, las operaciones con archivos del disco, la escritura de mensajes en el terminal, la lectura de datos del teclado, la lectura de eventos del ratón, etc. Parece lógico que se extienda también a la programación de comunicaciones en red y eso es lo que hace la interfaz socket.
Una conexión de red no tiene ningún elemento en el disco que la represente. Por tanto no queda más remedio que sustituir la llamada open por otra equivalente que proporcione la información necesaria para la comunicación. Esa llamada se llama socket y es la que da nombre a la interfaz de programación. La llamada socket asigna un descriptor de archivo a un canal de comunicación. Pero el canal de comunicación no basta, necesitamos proporcionar los datos acerca del destinatario o el origen de cada mensaje (direcciones IP que utiliza, puertos TCP o UDP, etc.). Esto se hace con una nueva llamada connect para el lado del cliente o bind para el lado del servidor. Cuando el socket está conectado ya funciona como un descriptor de archivo normal.
A partir de ese momento todas las llamadas de descriptores de archivo son también válidas (read, write y close son también operaciones que se pueden realizar sobre sockets una vez que están conectados).
Las comunicaciones UDP no necesitan más llamadas, esto es todo. Es tan similar que en algunos sistemas operativos como Plan9 o 2k los sockets se crean con llamadas a open usando una ruta de archivo especial. A pesar de todo GNU proporciona otras llamadas sendto o recvfrom que no hacen sino combinar la llamada write con la llamada connect y la llamada read con la llamada bind. No las usaremos en absoluto.
Sin embargo TCP es mas complejo. Para proporcionar las garantías adicionales necesita que se implemente el concepto de conexión como el establecimiento de un nuevo canal único entre los dos procesos que se comunican. En el lado del cliente es sencillo, basta con que connect haga este trabajo. La conexión en este caso no es simplemente asignar la dirección destino, sino reservar una serie de recursos para la comunicación con el destino.
El lado del servidor TCP es el más complejo. Cada cliente que se conecte con el servidor tiene que disponer de su propia conexión. Con socket y bind podemos crear un socket que atiende mensajes destinados a una dirección concreta y a un puerto concreto, pero solo uno. La solución pasa por una llamada más, accept, que crea otro nuevo socket en cada conexión desde un proceso cliente. La API se completa con una llamada listen que es preciso invocar para configurar cuantas conexiones casi simultáneas es posible atender.
Aunque hay muchos más detalles que ni hemos mencionado creo que puede servir para entender cómo se programan las comunicaciones. Estas tablas pueden servir para entender la secuencia de operaciones que se debe realizar.
| Servidor UDP | Cliente UDP | Descripción |
|---|---|---|
socket |
socket |
Crea canal de comunicación. |
bind |
connect |
Configura direcciones origen/destino. |
read |
read |
Recibe datos del otro extremo. |
write |
write |
Envía datos al otro extremo. |
close |
close |
Cierra el canal de comunicación. |
| Servidor TCP | Cliente TCP | Descripción |
|---|---|---|
socket |
socket |
Crea canal de comunicación. |
bind |
connect |
Configura direcciones origen/destino. |
listen |
Configura el número de conexiones simultáneas. | |
accept |
Crea socket esclavo para atender conexión. | |
read |
read |
Recibe datos del otro extremo. |
write |
write |
Envía datos al otro extremo. |
close |
close |
Cierra el canal de comunicación. |