Entradas y salidas digitales
La versión online de este libro incorpora una línea de tiempo interactiva con la historia de la Raspberry Pi. Repasa un poco la evolución del concepto de la Raspberry Pi. Inicialmente parecía que iba a ser un pincho USB, similar a los mediacenters que se enchufan directamente en el televisor. Si el objetivo era reducir coste ¿por qué terminó siendo mucho más grande?
La respuesta la tenemos que buscar en los objetivos del proyecto. Sus diseñadores querían que fuera una plataforma docente, no simplemente un ordenador barato. Querían que los alumnos de la secundaria experimentaran por sí mismos no solo la programación, sino la construcción de sus propios equipos electrónicos. Era esencial que fuera fácil conectar cosas.
Por eso desde el primer modelo la Raspberry Pi cuenta con un buen número de pines que pueden configurarse como entradas o salidas digitales para controlar cualquier periférico, sensor o actuador externo. Se trata de los pines de GPIO (General Purpose Input/Output). En este capítulo trataremos sus características generales y posteriormente veremos los detalles de programación.
Conector de GPIO

Los modelos originales cuentan con un conector de 2x13 pines etiquetado como P1. Todos los modelos posteriores son compatibles con estos primeros 26 pines. Éste es el único pensado realmente para proporcionar entradas y salidas digitales de propósito general. El conector P1 proporciona acceso a 17 pines de GPIO. En la revisión 2 de la Raspberry Pi modelo B, junto a P1 se encuentra un zócalo despoblado, el P5 de 2x4 pines, que proporciona acceso a 4 pines de GPIO adicionales.
Los modelos A+ y B+ amplían considerablemente el número de pines disponibles del conector P1 de 26 pines a un nuevo conector J8 de 40 pines. Entre ellos 9 pines más de GPIO. Sin embargo la compatibilidad es total, puesto que los 26 primeros pines mantienen su función original.
En lo sucesivo utilizaremos la numeración correspondiente al nuevo conector de 40 pines. Su equivalente en los conectores P1 y P5 puede verse en la tabla al inicio de este capítulo. Cuando hablemos de números de pines nos referiremos al nuevo conector J8 a menos que se indique lo contrario.
Por un lado la mayoría de los pines son entradas/salidas digitales de propósito general. Pueden configurarse como entradas o salidas, pueden leerse o pueden escribirse con un valor digital, alto o bajo, uno o cero. Ten presente que el nivel alto es de 3.3V y no son tolerantes a tensiones de 5V.
Los pines 8 y 10 pueden configurarse como interfaz UART para un puerto serie convencional. De hecho ésta es su configuración por defecto en Raspbian, ya que la UART se usa como consola.
Por otro lado los pines 3 y 5, se pueden configurar como interfaz I2C para interactuar con periféricos que siguen este protocolo. En el taller ya lo hemos configurado de este modo.
El pin 12 puede configurarse como salida PWM. En teoría los pines 12 y 13 pueden configurarse también como interfaz I2S (audio digital) pero hacen falta pines que no están disponibles fácilmente.
Los pines 19, 21, 23, 24 y 26 se pueden configurar como la primera interfaz SPI (SPI0) para interactuar con periféricos que siguen este protocolo. En el taller ya los hemos configurado de este modo.
Los pines 27 y 28 no están disponibles. Están reservados para la incorporación opcional de una memoria serie en las placas de expansión conforme a la especificación HAT. Son los únicos pines que en el arranque se configuran como salidas, todos los demás son configurados inicialmente como entradas para evitar problemas.
Los pines 29, 31, 32, 33, 35, 36, 37, 38 y 40 proporcionan acceso a nuevas patas de GPIO que no estaban disponibles en los modelos originales. Estas patas pueden tener otros usos adicionales. Por ejemplo los pines 32, 33 y 35 pueden utilizarse para salidas PWM (solo dos canales disponibles). Además estas patas completan los pines necesarios para configurar otra interfaz SPI (SPI1), que no vamos a utilizar en el taller.
Warning
El zócalo P5 de los modelos originales está originalmente pensado para poblarlo desde la capa inferior del circuito. Los pines de la figura adjunta están consignados según este criterio. Si se monta en la capa superior la asignación de pines será su reflejo especular.
En total disponemos de 26 pines para entradas y salidas digitales y dos de ellos pueden usarse para control PWM.
Protección de GPIO
Cuando se utilizan los pines de GPIO para interfaz con hardware de cualquier tipo hay que poner mucho cuidado para no dañar la propia Raspberry Pi. Es muy importante comprobar los niveles de tensión y la corriente solicitada. Los pines de GPIO pueden generar y consumir tensiones compatibles con los circuitos de 3.3V (no son tolerantes a 5V) y pueden sacar hasta 16 mA. Eso es suficiente para iluminar un LED, pero para poco más.
Sin embargo hay que tener presente que la corriente que sale de esos pines proviene de la fuente de alimentación de 3.3V y esta fuente está diseñada para una carga pico de unos 3 mA por cada pin de GPIO. Es decir, aunque el SoC de Broadcom permita drenar hasta 16 mA por cada pin la fuente no podrá dar mas de unos 78 mA en total (51 mA en los modelos originales). No supone riesgo alguno si intentas superar este límite, pero no funcionará.
Warning
Los pines GPIO de la Raspberry Pi no son tolerantes a tensiones de 5V. Están pensados para su utilización con circuitos de 3.3V y no tienen ningún tipo de protección. No debes drenar más de 16mA por pin.
Para evitar problemas se han fabricado una amplia variedad de tarjetas de expansión, que protegen de diversas formas los pines de GPIO. Las más conocidas son:
Gertboard de Gert van Loo, uno de los primeros voluntarios de la Raspberry Pi Foundation.
Una amplia variedad de métodos de protección está disponible en el
tutorial de elinux.org titulado
GPIO Protection Circuits.
Programar entradas y salidas digitales
La referencia definitiva para programar cualquiera de los periféricos del BCM2835 es la hoja de datos del fabricante [Citation not found], aunque se trata de un documento denso y árido. Es también ilustrativo el documento de Gert van Loo GPIO pads control.
En capítulos posteriores veremos algunos ejemplos para familiarizarnos con este periférico, pero es posible que te interese ampliar la información. Para empezar probablemente el mejor tutorial es el de elinux.org, que lleva por título RPi Tutorial: Easy GPIO Hardware & Software y especialmente los ejemplos de programación utilizando diversos lenguajes y mecanismos. El manual de la Gertboard también tiene abundante información pero el software es difícil de encontrar.
Desde el punto de vista del programador los pines de GPIO de la
Raspberry Pi se ven como dispositivos mapeados en memoria. Es decir,
para configurar los pines, sacar valores digitales o leer señales
digitales tenemos que leer o escribir en posiciones de memoria
determinadas. Sin embargo el procesador de la Raspberry Pi utiliza un
mecanismo denominado memoria virtual, en el que cada proceso ve un
espacio de direcciones diferente, que no necesariamente tiene que
corresponder con el espacio físico y que garantiza el aislamiento
entre procesos. En GNU/Linux para poder acceder a direcciones físicas
determinadas es necesario emplear un dispositivo (/dev/mem) que a
todos los efectos se comporta como un archivo normal. Por ejemplo, en
la posición 0x20200034 del dispositivo /dev/mem puede leerse el
valor de las entradas GPIO0 a GPIO31.
Obviamente acceder a todo el espacio físico de direcciones es muy
peligroso, puesto que permite que desde un proceso se pueda acceder a
todo el espacio de direcciones de los demás procesos. No solo se
compromete el aislamiento entre procesos sino también la seguridad del
sistema. Un proceso malicioso podría utilizar funciones
privilegiadas. Si piensas que eso no te afecta es que no sabes lo
suficiente de seguridad informática. De vez en cuando echa un vistazo
a las ponencias de Blackhat para ver qué se
cuece en el mundo de la seguridad y verás que afecta a todo (robots,
equipamiento médico, televisores, equipamiento industrial, domótica,
sistemas de telecomunicación, ...). Un usuario malicioso podría
incluso dañar físicamente la Raspberry Pi. Por este motivo el
dispositivo /dev/mem tiene permisos de escritura solamente para el
superusuario.
Las versiones recientes de Raspbian tienen un dispositivo
/dev/gpiomem que permite acceder solo al rango de direcciones de los
pines de GPIO y tiene permiso de escritura para el grupo gpio. El
usuario pi es del grupo gpio. Por tanto los programas del usuario
pi pueden actuar sobre los pines de GPIO. En la práctica esto puede
no ser así porque muchas bibliotecas no utilizan aún /dev/gpiomem.
Características de los pines de GPIO
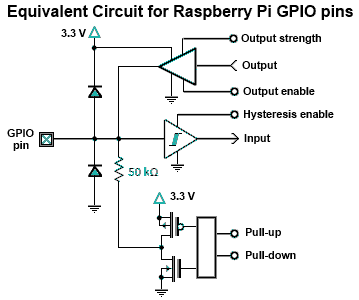
Los pines de GPIO de la Raspberry Pi incorporan un conjunto de características muy interantes:
Tienen capacidad de limitar el slew rate. Esto permitiría mejorar la inmunidad al ruido y reducir el ruido de crosstalk, pero a costa de alargar los tiempos de propagación.
Se puede programar su drive stregth, es decir, su capacidad de entregar corriente, entre 2 mA y 16 mA en saltos de 2 mA (ocho posibles valores). Básicamente consiste en la posibilidad de activar más o menos drivers en paralelo. Para mayor detalle consulta el documento de Gert van Loo referido arriba. Normalmente en el arranque está configurado a 8 mA. Esto no significa que no podamos pedir más corriente. Hasta 16 mA es seguro. Sin embargo si superamos los 8 mA la tensión bajará hasta el punto de que un uno lógico pueda dejar de interpretarse como uno y la disipación de calor será mayor. Por otro lado si programamos los pines a su máxima capacidad tendremos picos de corriente que afectan al consumo y pueden llegar a afectar al funcionamiento de la trajeta microSD, especialmente con cargas capacitivas. Este efecto se nota más cuanto mayor número de salidas conmuten simultáneamente.
Es posible configurar las entradas con o sin Schmitt trigger de manera que la transición a nivel bajo y a nivel alto tengan umbrales diferentes. Esto permite dotar de cierta tolerancia a ruido.
Es posible habilitar una resistencia de pullup y/o pulldown. Su valor es en torno a los 50KOhm.
La configuración de limitación de slew rate, drive strength y entrada con Schmitt trigger no se realiza pin a pin sino en bloques (GPIO0-27, GPIO28-45, GPIO46-53). Para los intereses del taller no debería haber problemas con la configuración por defecto.
Es posible examinar el estado y configuración de Para ello vamos a
utilizar la utilidad gpio que incluye la biblioteca wiringPi.
pi@raspberrypi:~ $ gpio readall
+-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| | | 3.3v | | | 1 || 2 | | | 5v | | |
| 2 | 8 | SDA.1 | ALT0 | 1 | 3 || 4 | | | 5V | | |
| 3 | 9 | SCL.1 | ALT0 | 1 | 5 || 6 | | | 0v | | |
| 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | ALT0 | TxD | 15 | 14 |
| | | 0v | | | 9 || 10 | 1 | ALT0 | RxD | 16 | 15 |
| 17 | 0 | GPIO. 0 | IN | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 |
| 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | |
| 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 |
| | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 |
| 10 | 12 | MOSI | ALT0 | 0 | 19 || 20 | | | 0v | | |
| 9 | 13 | MISO | ALT0 | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 |
| 11 | 14 | SCLK | ALT0 | 0 | 23 || 24 | 1 | OUT | CE0 | 10 | 8 |
| | | 0v | | | 25 || 26 | 1 | OUT | CE1 | 11 | 7 |
| 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
| 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | |
| 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
| 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | |
| 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
| 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
| | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+---Pi 3---+---+------+---------+-----+-----+
pi@raspberrypi:~ $ ▂
La columna BCM indica la numeración de Broadcom (GPIO n). La
columna Physical contiene el número de pin en el conector J8 y la
columna V contiene el valor leído. La columna Name representa la
función del pin pero debes tener cuidado porque cuando aparece
GPIO.21 no se refiere a la nomenclatura de Broadcom, que es la
usual, sino a una nomenclatura propia de la biblioteca wiringPi.
Para interpretarlo correctamente debes mirar en el número
correspondiente de la columna BCM, así que GPIO.21 es en realidad
GPIO 5. Esta confusión artificial ha sido objeto de numerosas
críticas a la biblioteca wiringPi pero parece que los usuarios de
Arduino lo ven como algo natural.
Funciones alternativas
Todos los pines de GPIO tienen la posibilidad de ser usados con otras funciones alternativas. Cada pin de GPIO puede configurarse como entrada, salida o como una de las seis funciones alternativas (desde Alt0 hasta Alt5). No todas las configuraciones tienen sentido, consulta [Citation not found] para mayor detalle.
Junto a tu kit de iniciación en el taller recibirás una tarjeta que resume las funciones que a nosotros nos interesan. Para mayor detalle consulta el flyer que también te proporcionamos o la documentación de elinux.org que incluye toda la información dispersa. Si no encuentras ejemplos de alguno de los periféricos y no consigues hacerlo funcionar pregunta en el foro del taller.
Este esquema puede resultarte útil para usos avanzados:

De todas formas debes tener presente que algunos elementos no pueden seleccionarse con seguridad porque ya se han utilizado en otras partes de la Raspberry Pi. Por ejemplo, el BCM2837 tiene dos interfaces SD y dos UART. Sin embargo ambas interfaces SD están ocupadas (una para la tarjeta microSD y otra para la comunicación WiFi. Análogamente UART0 se destina a la interfaz Bluetooth en la Raspberry Pi 3 y solo se expone UART1 en los pines 8 y 10. Otro ejemplo son los relojes de propósito general (GPCLKx) que permiten generar relojes de frecuencia programable en determinadas patas. GPCLK1 está reservado para uso interno (Ethernet) y si se intenta usar lo más probable es que se cuelgue la Raspberry Pi. Nada grave, pero tampoco es agradable.
Manipulando pines en la consola
Vamos a empezar a usar los componentes sin escribir ni una línea de código, empleando programas que tienes disponibles. Conecta un LED a una de las patitas (por ejemplo GPIO18) con una resistencia para limitar la corriente a 15mA. Para ello te puedes ayudar de esta tabla tomada de theledlight.com corrigiendo el valor para los LEDs de Banggood que tenemos en el kit.
| Tipo | Caída | Resistencia (15mA) |
|---|---|---|
| Rojo | 1.7V | 100 Ohm |
| Amarillo | 2V | 87 Ohm |
| Verde | 2.1V | 80 Ohm |
| Blanco | 2.7V | 40 Ohm |
| Azul | 2.9V | 27 Ohm |
El kit tiene un conjunto de componentes discretos que incluye LEDs y resistencias. En teoría se incluyen tres de cada uno de los colores rojo, amarillo, verde y blanco. En la práctica dependiendo de la disponibilidad pueden incluir otro tipo de LEDs e incluso otro número. Por ejemplo, en un pedido de prueba que realizamos al comenzar el año recibimos 15 LEDs (5 rojos, 5 amarillos y 5 azules). Los objetivos del taller no se ven afectados en absoluto, así que esto nos parece una anécdota menor.
Los LEDs del kit no están coloreados, así que es difícil saber de qué color son. En las bolsitas suelen tener una letra (R, G, Y, W) para indicar el color, pero no siempre. De todas formas si ponemos una resistencia de 100 Ohm estamos seguros de no superar los límites y se enciende sin problemas hasta el LED azul. Veamos cómo encender y apagar el LED conectado a la pata GPIO18:
pi@raspberrypi:~ $ gpio -g mode 18 out
pi@raspberrypi:~ $ gpio -g write 18 1
pi@raspberrypi:~ $ gpio -g write 18 0
pi@raspberrypi:~ $ ▂
En la primera línea hemos configurado la pata como salida. En las
siguientes simplemente escribimos un valor en esa pata (1 y 0). La
opción -g le indica a gpio que use la numeración de patas normal.
Nota Estamos de suerte en el kit de BangGood porque los diodos blancos tienen una caída de tensión moderada. Por desgracia, en muchas otras ocasiones esto no es así y es frecuente tener caídas de tensión de 3.4V en un LED blanco. Una consecuencia de esto es que no podemos encenderlos con salidas de 3.3V. En esos casos puedes usar el level shifter o un transistor, pero ¿es necesario? Aquí tienes el reto, si tuvieras un LED blanco con caída de 3.4V ¿qué harías? Usa los mismos componentes que antes pero configura el circuito para que se encienda sin problemas con una pata de GPIO.
El siguiente paso es utilizar las patas de GPIO como entradas digitales. Para ello conecta uno de los pulsadores entre otra pata de GPIO y masa. Lo normal es además poner una resistencia de pull-up de 10K entre la pata y 3.3V para que la entrada no este flotando mientras el pulsador no está apretado. Puedes hacerlo, pero te recordamos que también puedes usar el pull-up interno.
pi@raspberrypi:~ $ gpio -g mode 23 in
pi@raspberrypi:~ $ gpio -g mode 23 up
pi@raspberrypi:~ $ gpio -g read 23
1
pi@raspberrypi:~ $ ▂
Cada vez que ejecutemos gpio -g read 23 nos devolverá el estado (0
para el conmutador pulsado y 1 para no pulsado).
Modulación de anchura de pulsos
Pulse Width Modulation (PWM) es una técnica que consiste en la variación del duty cycle de una señal digital periódica, fundamentalmente con dos posibles objetivos:
Por un lado se puede utilizar como mecanismo para transmitir información. Por ejemplo, los servo-motores tienen una entrada digital por la que se transmite el ángulo deseado codificado en PWM.
Por otro lado se puede utilizar para regular la cantidad de potencia suministrada a la carga. Por ejemplo, las luminarias LED frecuentemente utilizan reguladores PWM para permitir el control de intensidad.
La Raspberry Pi tiene una varias patas de GPIO (GPIO12, GPIO13, GPIO18 y GPIO19) que puede configurarse como salida de alguno de los dos canales PWM. El propio BCM2835 se encarga de gestionar la generación de la señal, liberando completamente al procesador principal.
El periférico PWM de la Raspberry Pi es muy flexible pero solo dispone de dos canales (PWM0 y PWM1). Puede funcionar en modo PWM o en modo serializador. En el modo serializador simplemente saca por la pata correspondiente los bits de las palabras que se escriben en un buffer. Veamos primero el modo PWM.
El usuario puede configurar dos valores:
- Un rango de valores disponible (hasta 1024).
- Un valor que determina el duty cycle. El módulo PWM se encarga de mantener el duty cycle en la relación valor/rango.
La frecuencia base para PWM en Raspberry Pi es de 19.2Mhz. Esta
frecuencia puede ser dividida mediante el uso de un divisor indicado
con pwmSetClock, hasta un máximo de 4095. A esta frecuencia
funciona el algoritmo interno que genera la secuencia de pulsos, pero
en el caso del BCM2835 se dispone de dos modos de funcionamiento, un
modo equilibrado (balanced) en el que es difícil controlar la
anchura de los pulsos, pero permite un control PWM de muy alta
frecuencia, y un modo mark and space que es mucho más intuitivo y
más apropiado para controlar servos. El modo balanced es apropiado
para controlar la potencia suministrada a la carga.
En el modo mark and space el módulo PWM incrementará un contador interno hasta llegar a un límite configurable, el rango de PWM, que puede ser de como máximo 1024. Al comienzo del ciclo el pin se pondrá a 1 lógico, y se mantendrá hasta que el contador interno llegue al valor puesto por el usuario. En ese momento el pin se pondrá a 0 lógico y se mantendrá hasta el final del ciclo.
Veamos su aplicación al control de un servomotor. Un servomotor tiene una entrada de señal para indicar la inclinación deseada. Cada 20ms espera un pulso y la anchura de este pulso determina la inclinación del servo. Alrededor de 1.5ms es la anchura del pulso necesaria para la posición centrada. Una anchura menor hace girar el servo en sentido antihorario (hasta 1ms aproximadamente) y una duración mayor lo hace girar en sentido horario (hasta 2ms aproximadamente). En este caso hay que calcular el rango y el divisor para que el pulso se produzca cada 20ms y el control de la anchura del pulso alrededor de los 1.5ms sea con la máxima resolución posible.
El montaje es tal como muestra la figura. El cable rojo del servo (V+) se conecta a +5V en P1-2 o P1-4, el cable negro o marrón (V-) a GND en P1-6 y el cable amarillo, naranja o blanco (signal) a GPIO18 en P1-12. No se necesita ningún otro componente.

Para tener máximo control de la posición del servo probaremos con el rango máximo, de 1024. En ese caso el divisor tiene que ser tal que la frecuencia del pulso PWM sea:
Es decir, el divisor habría que configurarlo a 390. El rango completo del servo depende del modelo concreto. Teóricamente debería ser entre 52 y 102, siendo el valor completamente centrado 77. En la práctica habrá que probar el servo concreto porque los límites de 1ms y 2ms no son estrictos. Nuestros experimentos dan un rango útil entre 29 y 123 para el microservo de TowerPro disponible en el kit del alumno.
Veamos cómo se puede controlar sin programar nada. Primero configuramos la pata GPIO18 como habíamos calculado:
pi@raspberrypi:~ $ gpio -g mode 18 pwm
pi@raspberrypi:~ $ gpio pwm-ms
pi@raspberrypi:~ $ gpio pwmr 1024
pi@raspberrypi:~ $ gpio pwmc 390
pi@raspberrypi:~ $ ▂
Ahora podemos cambiar el valor correspondiente para que gire a la posición deseada.
pi@raspberrypi:~ $ gpio -g pwm 18 52
pi@raspberrypi:~ $ gpio -g pwm 18 102
pi@raspberrypi:~ $ ▂
Warning Recuerda que solo hay dos canales PWM disponibles y que estos canales solo se pueden asignar a ciertas patas (PWM0 en GPIO12 y GPIO18, PWM1 en GPIO13 y GPIO19).
Más sobre PWM
Para los propósitos del taller no nos detendremos más en el módulo PWM, pero tened en cuenta que la gama de posibilidades es mucho mayor. No descartamos incorporar a esta sección en el futuro más información sobre los otros modos de funcionamiento. De momento preferimos avanzar para conocer otros periféricos.
Ten presente que el audio analógico incluido en la Raspberry Pi utiliza los dos canales PWM, así que si usas sonido analógico procura evitar el uso de PWM. Nuestra recomendación es que uses un altavoz Bluetooth o bien puedes emplear una placa de audio externa (HiFi-Berry, por ejemplo).