Programación en C de SPI
Las tres bibliotecas que hemos usado para la programación de entradas y salidas digitales soportan también el uso de la interfaz SPI. Los módulos SPI se benefician de la capacidad de envío y recepción concurrente y pueden conseguirse tasas muy razonables (30MHz).
Programación de SPI con wiringPi
La programación es sencilla en cuanto que solo utiliza dos funciones, pero puede ser realmente enrevesada de entender la comunicación con algunos dispositivos SPI. El motivo es que en SPI para poder leer datos hay que escribir datos, de hecho se lee a la vez que se escribe. Esto hace que en los dispositivos reales haya que hacer muchas transacciones que se descartan por completo.
Este ejemplo reproduce el que describíamos en el capítulo anterior
utilizando la herramienta pigs, esta vez empleando wiringPi.
#include <stdio.h>
#include <stdlib.h>
#include <wiringPiSPI.h>
void ads1118_rw(int ch, char buf[4]) {
buf[0] = 0x80; buf[1] = 0x4b;
buf[0] = 0x80; buf[1] = 0x4b;
wiringPiSPIDataRW (0, buf, 4);
}
int main (void) {
wiringPiSPISetup(0, 4000000);
char data[4];
ads1118_rw(0, data);
printf("Control reg = %02x%02x\n", data[2], data[3]);
delay(100);
ads1118_rw(0, data);
short v = data[0] << 8 | data[1];
printf("AD0 = %02x%02x (%d)\n", data[0], data[1], v);
return 0;
}
La función wiringPiSPISetup inicializa la comunicación para el canal
0 a 10Mz. Hay dos canales disponibles (0 y 1) que utilizan las mismas
patas salvo la de selección SPI_CE0 y SPI_CE1 respectivamente.
Las llamadas a wiringPiSPIDataRW realizan una transacción SPI
donde se escribe y se lee de manera concurrente un conjunto de bytes.
El significado preciso de lo que se lee y se escribe depende del
dispositivo y en algunos casos puede requerir descartar parte o toda
la información. En este caso el primer byte es la orden y a
continuación se envían los argumentos.
Un resumen de las funciones involucradas:
| Función | Descripción |
|---|---|
wiringPiSPISetup(canal, velocidad) |
Prepara un canal SPI y lo configura a una velocidad determinada. |
wiringPiSPIDataRW(canal, bytes, long) |
Escribe y lee a la vex un conjunto de bytes. |
La simplicidad es máxima pero también se pierden las capacidades del hardware para poder acomodar todos los modos de transferencia de SPI. Pueden consultarse más detalles en el artículo de Gordon Henderson disponible en projects.drogon.net.
El problema de wiringPi es que para transferencias SPI no permite seleccionar el modo. Su autor considera que la gran mayoría de los módulos SPI usan el modo 0. Puede ser cierto, pero los ADS1118 que usamos en el taller son modo 1.
Warning La biblioteca wiringPi asume que utilizamos SPI0 con el modo 0. Por este motivo no la recomendamos, porque el módulo CJMCU-1118 utiliza el modo 1.
Programación de SPI con bcm2835
En la biblioteca bcm2835 contamos con una gama de funciones más próxima al hardware. Algunas funciones son similares a wiringPi pero añade muchas más para configurar el modo de transferencia y la interfaz SPI.
#include <stdio.h>
#include <bcm2835.h>
int main (void) {
bcm2835_init();
bcm2835_spi_begin();
bcm2835_spi_setDataMode(1);
bcm2835_spi_setClockDivider(5); // 19.2MHz / 5 ~ 4MHz
bcm2835_spi_chipSelect(0);
char tdata[4] = { 0x80, 0x4b, 0x80, 0x4b };
char rdata[4];
bcm2835_spi_transfernb(tdata, rdata, 4)
printf("Control reg = %02x%02x\n", rdata[2], rdata[3]);
bcm2835_delay(100);
bcm2835_spi_transfernb(tdata, rdata, 4)
short v = rdata[0] << 8 | rdata[1];
printf("AD0 = %02x%02x (%d)\n", rdata[0], rdata[1], v);
bcm2835_spi_end();
bcm2835_close();
return 0;
}
Aunque parece más complejo realmente se debe al mayor control de la inicialización. La inicialización es más larga, pero la posibilidad de usar buffers distintos de transmisión y recepción simplifica muchos casos frecuentes.
Un resumen de las funciones involucradas:
| Función | Descripción |
|---|---|
bcm2835_spi_begin() |
Inicializa el módulo de SPI. |
bcm2835_spi_end() |
Libera los recursos empleados en la inicialización. |
bcm2835_spi_setClockDivider(div) |
Define el divisor del reloj. |
bcm2835_spi_setDataMode(modo) |
Modo SPI según se comentó en capítulo 2. |
bcm2835_spi_chipSelect(cs) |
Pin de CS (0, 1, 2), 3 = ninguno. |
bcm2835_spi_setChipSelectPolarity(cs, v) |
Define la polaridad del pin cs como activa a valor v. |
bcm2835_spi_transfer(v) |
Transmite y recibe (devuelve) un byte. |
bcm2835_spi_transfernb(tbuf, rbuf, len) |
Transmite y recibe len bytes. |
bcm2835_spi_transfern (buf, len) |
Transmite y recibe len bytes en el mismo buffer. |
bcm2835_spi_writenb (buf, len) |
Transmite len bytes. |
Programación de SPI con pigpio
Con pigpio es posible utilizar el periférico auxiliar SPI (SPI1) además del principal (ver bandera A del campo de banderas en spiOpen). La ventaja es que esta otra interfaz SPI tiene tamaño de palabra configurable y tres líneas de chip select disponibles (en lugar de dos). Por otro lado la interfaz principal es sensiblemente más rápida, por lo que utilizaremos esa normalmente.
#include <stdio.h>
#include <pigpio.h>
int main (void) {
gpioInitialise();
int spi = spiOpen(0, 4000000, 1);
char tdata[4] = { 0x80, 0x4b, 0x80, 0x4b };
char rdata[4];
spiXfer(spi, tdata, rdata, 4)
printf("Control reg = %02x%02x\n", rdata[2], rdata[3]);
bcm2835_delay(100);
spiXfer(spi, tdata, rdata, 4)
short v = rdata[0] << 8 | rdata[1];
printf("AD0 = %02x%02x (%d)\n", rdata[0], rdata[1], v);
spiClose(spi);
gpioTerminate();
return 0;
}
Al igual que bcm2835 utiliza buffers diferentes para la transmisión y la recepción, lo que en muchos casos simplifica el trabajo y permite usar buffers constantes en la transmisión.
| Función | Descripción |
|---|---|
spiOpen(ch, b, f) |
Abre un canal SPI con una frecuencia b y banderas f (ver capítulo 2). |
spiClose(spi) |
Cierra canal SPI. |
spiRead(spi, buf, n) |
Lee n bytes del canal SPI. |
spiWrite(spi, buf, n) |
Escribe n bytes por el canal SPI. |
spiXfer(spi, tbuf, rbuf, n) |
Lee y escribe simultáneamente n bytes del canal SPI. |
Medir tiempos de forma precisa
La medición del tiempo de descarga de un condensador se ha propuesto como técnica para medir magnitudes analógicas usando las entradas digitales de la Raspberry Pi. La propuesta de Adafruit utiliza el número de iteraciones de un bucle para medir el tiempo. Como ellos mismos reconocen esto no es muy preciso.
Raspbian es un sistema de tiempo compartido. La Raspberry Pi ejecuta varios programas a la vez y esto implica que el procesador puede desalojar) nuestro programa para ejecutar otro programa. En ese caso el número de iteraciones del bucle será sensiblemente menor de lo normal. Pero, ¿cómo sabemos si ha habido desalojo? La triste realidad es que un programa de usuario no puede saberlo, no tiene control sobre esto. Ni siquiera es ésta la única causa de incertidumbre, puede haber interferencia de los manejadores de interrupción, de los manejadores de dispositivo, etc.
Pero hay una forma de medir el tiempo con bastante precisión, usando la pata MISO de la interfaz SPI y una pata de salida digital.
Supongamos que tenemos un dispositivo sensor cuya medida se materializa en el valor de una resistencia. Puede tratarse de una LDR, como en el caso del artículo de Adafruit, o de un simple potenciómetro, o un termistor, o un sensor piezoresistivo, o un sensor magnetorresistivo, ... Construimos un circuito RC similar a la figura.
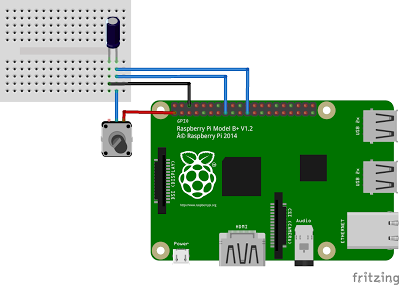
Descargamos el condensador poniendo la pata GPIO22 a nivel bajo durante un tiempo suficiente. Configuramos la pata GPIO22 como entrada para que quede en alta impedancia y empezamos una transferencia SPI de gran tamaño. El buffer debe estar lleno de ceros hasta que la carga del condensador es suficiente para poder ser interpretada como un 1. El primer byte distinto de cero marca el instante de tiempo en que el condensador está razonablemente cargado. Este tiempo es proporcional a RC y por tanto a R. Se puede realizar un calibrado para medir con precisión absoluta, pero en cualquier caso tenemos una medida precisa que nos permite comparar.
El código es sumamente sencillo. Lo proporcionamos solamente en wiringPi.
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <wiringPi.h>
#include <wiringPiSPI.h>
enum {
BUF_SIZE = 4096,
DISCHARGE = 22
};
int main (void) {
wiringPiSPISetup(0, 500000);
char* buf = malloc(BUF_SIZE);
wiringPiSetupGpio();
pinMode(DISCHARGE, OUTPUT);
digitalWrite(DISCHARGE, 0);
sleep(1);
pinMode(DISCHARGE, INPUT);
wiringPiSPIDataRW (0, buf, BUF_SIZE);
for (int i = 0; i < BUF_SIZE; ++i)
if (buf[i] != 0) {
printf("%d %02x\n", i, buf[i]);
break;
}
free(buf);
return 0;
}
El programa imprime la posición del buffer donde la entrada empieza a ser distinta de cero y el primer valor distinto de cero. Esa posición habría que multiplicarla por 8 para traducirla a ciclos de SCLK y podría ajustarse con el valor para obtener el número exacto de ciclos.
La precisión depende del periodo de reloj empleado. En el ejemplo hemos empleado un reloj de 500KHz, pero puede subirse hasta 32MHz con seguridad. El problema es que a mayor reloj, mayor es el buffer que tenemos que usar en la transferencia SPI.
Para buffers mayores de 4KB hay que especificarlo en la línea de
órdenes del kernel (/boot/cmdline.txt) y reiniciar la Raspberry Pi.
Por ejemplo, para 256KB se añadiría:
spidev.bufsiz=262144
Puede mejorarse el código haciendo búsqueda por bisección. Es deliberadamente simple para que se entienda desde el punto de vista conceptual. El resultado es que podríamos medir RC con una precisión de hasta 1/32 us. Si usamos un condensador de 1uF esto implica que podemos medir R con una precisión de 1/32 Ohm. Incluso si usamos el reloj de 500KHz tendremos una precisión de 2 Ohm, que tampoco está nada mal.
Los resultados reales pueden ser algo peores por jitter o inestabilidad en SCLK o ruido en la resistencia. Un condensador cerámico en paralelo con el electrolítico puede ayudar a quitar ruido de alta frecuencia. En cualquier caso el método es mucho más preciso que la propuesta original de Adafruit, y no depende del estado de carga del sistema.
Retos para la semana
- Fácil Diseña un mecanismo para poder controlar tiras de LEDs empleando la interfaz SPI.